Home > Staff & Laboratory



Mechatronics Design
Computational Mechatronics Group
Development of Simulation Technologies in Design Processes
Computer simulation is indispensable in the design and development process of advanced devices, machineries, and structures. Precise modeling of design objects, accurate and fast computation, and optimizing the design solutions are crucial in the process. The Computational Mechatronics Group aims at developing fast computation techniques and novel numerical methods to cope with large scale complicated engineering applications, physically coupled problems, and structural optimization methods.
- Modelings and optimizations of machineries and structures
- Development of numerical methods and related softwares for analyzing physical phenomena
- Development inverse and optimization methods for machineries and structures
- Control and analysis of dynamic behaviors of machineries and structures
- Development of new devices and metamaterials by using numerical methods
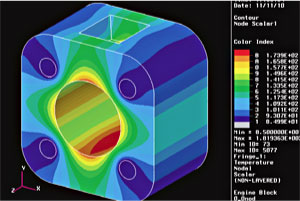
Nonlinear transient thermal analysis of an engine block model by BEM
| Group | Name | Position | |
|---|---|---|---|
| Computational Mechatronics | Toshiro Matsumoto | Professor | t.matsumoto@ |
| Toru Takahashi | Associate Professor | ttaka@ | |
| Hiroshi Isakari | Assistant Professor | isakari@ |
Append @nuem.nagoya-u.ac.jp to each Email account
Dynamical Analysis and Control of Mechatronics System
The development of the mechatronics system to move more safely, precisely, and effectively is desired. In this group, the analysis and suppression of the vibration problems, active/passive vibration control, condition monitoring and diagnostics, and the application of the smart materials in the field of mechatronics are investigated.
- Vibration analysis and suppression of the rotating machinery
- Magnetic levitation, magnetic bearing, and damping with electromagnetic actuators
- Vibration diagnostics of the fatigue crack in the rotating machinery
- Modeling of smart material and its application to mechanical system
- Applications of polymer actuators aimed at artificial muscle
- Modeling and analysis of the human-machine coupled vibration system considering the human characteristics
(Top) Snake robot using electroactive polymer
(Bottom) Magnetic bearing and Electro-magnetic Actuator
| Group | Name | Position | |
|---|---|---|---|
| Mechatro-Dynamics | Tsuyoshi Inoue | Professor | inoue@ |
| Yabui Shota | Assistant Professor | yabui@ |
Append @nuem.nagoya-u.ac.jp to each Email account
Intelligent and Precise Sensing for Micro-Nano Mechatronics
Our research projects involve micro-nano measurements, sensing and manipulation for biotechnology, robot-applied sensing, analyses of measurement information, and computer simulation. By quantitative measurements and analyses of micro-nano-scale phenomena, we aim to establish design fundamentals for micro-nano mechatronics such as micro-nano robots, information instruments, bio-sensing and bio-manipulation devices.
- Highly precise measurement for micro-nano mechatronics
- Development of micro-nano machines and their applications to sensing and manipulation
- Sensing and manipulation of bio-molecules and bio-objects
- Computer simulation for micro-nano mechatronics design
- Tactile sensing for robotic hand and virtual-reality display of haptic sense
Joint division with Department of Micro-Nano Systems Engineering, Integrated Mechatronics Devices Research Group, Micro-Nano Metrology Laboratory
(Right)
Ultra-miniature hard disk drive
(Left)
Micro-probe equipped with actuator fabricated by micro-machining technology
| Group | Name | Position | Intelligent Sensing | Kenji Fukuzawa | Professor | fukuzawa@ |
|---|---|---|---|
| Shintaro Itoh | Associate Professor | shintaro.itoh@ | |
| Naoki Azuma | Assistant Professor | naoki.azuma@ |
Append @nuem.nagoya-u.ac.jp to each Email account

Sensing and Control
Mathematical System Control Group
System Control and Signal Processing for Intelligent Mechatronics
Our research group aims at creating artificial products with comfort and safety to humankind through the research on system control and signal processing, which gives intelligence to mechatronics from the viewpoint of both the hardware (mechanisms, sensors, actuators, etc.) and the software (modeling, control, optimization, adaptation/learning, etc.).
- Mathematical Modeling: control-oriented modeling, model integration, model reduction, etc.
- System Control: optimal control, robust control, nonlinear control, etc.
- Intelligent Control: table tennis robot with sensor integration, adaptive/learning control, human centered control, etc.
- Humanoid Robot: multi-fingered hand, biped locomotion, etc.
- Control Implementation: vehicle dynamics and control, active vibration control, etc.
(Right)
Table Tennis Robot by using
Aerodynamics and High Speed Cammeras
(Left)
Two-Arms Robot
with
Multi-Fingered Hands
| Group | Name | Position | |
|---|---|---|---|
| Mathematical System Control | Azuma Shunichi | Professor | @ |
| Toru Asai | Associate Professor | asai@ | |
| Ryo Ariizumi | Assistant Professor | ariizumi@ |
Append @nuem.nagoya-u.ac.jp to each Email account
Design and Control of Intelligent Mechanical Systems based on Brain-like Control Mechanism
A variety of human dexterous movements are controlled by excellent neural systems. Our research group aims at clarifying the control mechanism and learning function of brain neural systems. We also develop intelligent mechanical systems using control theory and optimization technique from the view point of computational modelling of the brain.
- Biomechanical Control: measurement and analysis of human movement, control mechanism of skilled motion, etc.
- Brain-like Information Processing : model of motor learning, integration system for sensory motor information, etc.
- Health and Welfare: wearable robot for assisting paraplegics, support system for rehabilitation , etc.
- Intelligent Robotics: energy efficient biped locomotion, model predictive control, whole body control of humanoid, etc.
- Operations Research: optimization methods for machine learning and pattern recognition, dynamic programing, etc.


(Left) Wearable robot assisting locomotion
(Right) Performance of humanoid
| Group | Name | Position | |
|---|---|---|---|
| Biomechanical Control | Kouichi Taji | Associate Professor | taji@ |
Append @nuem.nagoya-u.ac.jp to each Email account
Modeling, Analysis and Control of Smart Mobility System based on Cutting-edge System Science
Desirable future mobility systems are investigated by using cutting-edge system science, such as hybrid dynamical system theory, decentralized autonomous system theory and so on. The collaboration with human operator and adaptation to complex environment are particularly considered. In addition, theoretical development and industrial application are both emphasized.
- Driving behavior analysis based on mathematical model and its application
- Development of control theory and measurement scheme for driver support system
- Self-localization and motion planning of autonomous wheel-type mobile robot
- Decentralized control and formal verification of multi-legged walking robot
- Decentralized probabilistic diagnosis and optimization for large-scale system


(Top) Driving simulator
(Bottom) Multi-legged walking robot
| Group | Name | Position | |
|---|---|---|---|
| Mobility System | Tatsuya Suzuki | Professor | t_suzuki@ |
| Shinkichi Inagaki | Associate Professor | inagaki@ | |
| Hiroyuki Okuda | Assistant Professor | h_okuda@ |
Append @nuem.nagoya-u.ac.jp to each Email account








