ホーム > 教職員・研究室紹介




メカトロニクス設計講座
設計におけるシミュレーション技術とダイナミクス
機械・構造物を設計するためには、対象物を精度良くモデル化し、その対象物の挙動をコンピュータなどを駆使して効率的に精度良く求め、それをもとに最適化することが必要となる。本グループではこれらの課題に関する研究を行っている。
- ◆機械・構造物のモデリングと最適設計
- ◆物理現象の高度な数値解析手法とソフトウエアの開発
- ◆機械・構造物の逆問題解析法の開発
- ◆機械・構造物の制御と動的挙動の解析
- ◆振動・騒音低減のためのダンピングデバイスの開発
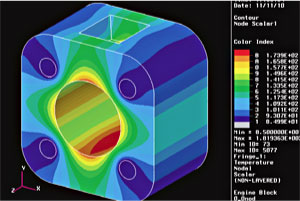
エンジンブロックの非線形・非定常熱伝導BEM解析
| グループ名 | 名 前 | 職 位 | 連絡先 |
|---|---|---|---|
| 計算メカトロニクスグループ | 松本 敏郎 | 教授 | t.matsumoto@ |
| 高橋 徹 | 准教授 | ttaka@ |
|
| 飯盛 浩司 | 助教 | isakari@ |
※メールを送信される場合は@nuem.nagoya-u.ac.jpを後ろにつけて下さい。
メカトロニクス系のモデリングとダイナミクス解析および設計
工業を支えるメカトロニクス系は、安全に,正確に,そして効率的に動かす必要がある。本グループでは、高速・高精度化に伴って発生する振動問題の解決、アクティブ・パッシブ振動制御、非線形解析を用いた機械の状態監視と診断、スマート材料のメカトロニクス系への応用に関する研究を行っている。
- ◆回転機械の振動解析と制振,ジャイロ発電
- ◆電磁アクチュエータを用いた磁気浮上・制振
- ◆疲労によるロータクラックの振動診断法の開発
- ◆スマートマテリアルのモデル化と機械構造物への応用
- ◆人工筋肉を目指した高分子アクチュエータの応用
- ◆人の特性を考慮した人間・機械振動系のモデリング・解析
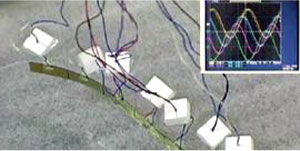
(上)高分子アクチュエータによるヘビ型ロボット
(下)磁気軸受・電磁アクチュエータ
| グループ名 | 名 前 | 職 位 | 連絡先 |
|---|---|---|---|
| メカトロダイナミクスグループ | 井上 剛志 | 教授 | inoue@ |
| 籔井 将太 | 助教 | yabui@ |
※メールを送信される場合は@nuem.nagoya-u.ac.jpを後ろにつけて下さい。
マイクロ・ナノ電子機械のための精密計測および知能計測
マイクロ・ナノロボット、情報機器、バイオ操作などにおけるマイクロ・ナノ領域の形状・現象・運動を対象として、ナノ分子操作・計測、ナノトライボロジー現象の測定・解析,測定情報のイメージング処理、測定対象の認識・理解などに関する研究を行っている。
また、ヒューマンファクターを考慮に入れることで、人間と親和性が良く、かつ安全性の高いメカトロニクスシステムの実現を目指す。
- ◆マイクロ・ナノダイナミクス解明のためのナノ計測
- ◆分子薄膜,生体膜などのナノ流体のダイナミクスの解明
- ◆ナノテク・バイオ操作におけるナノトライボロジー
- ◆マイクロ・ナノ加工によるマイクロ・機械デバイスの作製
- ◆ロボットハンド用触覚認識とバーチャルリアリティ型触覚呈示
(併担)マイクロ・ナノシステム工学専攻 集積機械デバイス講座
マイクロ・ナノ計測工学グループ
(右)
超小型ハードディスクドライブ
(左)
マイクロマシン技術を用いて作製した
アクチュエータ付きプローブ
| グループ名 | 名 前 | 職 位 | 連絡先 |
|---|---|---|---|
| 知的センシンググループ | 福澤 健二 | 教授 | fukuzawa@ |
| 伊藤 伸太郎 | 准教授 | shintaro.itoh@ | |
| 東 直輝 | 助教 | naoki.azuma@ |
※メールを送信される場合は福澤教授は@nuem.nagoya-u.ac.jpを、伊藤准教授、東助教は、mae.nagoya-u.ac.jp後ろにつけて下さい。

メカトロニクス制御講座
ダイナミクスのデザインとシステムの創成
ダイナミクスをデザインするための基盤となる「
- ◆数理モデリング,データ科学
- ◆ロバスト制御,ハイブリット/量子化制御,
マルチエージェント制御 - ◆ヘビ型ロボット,スワームロボットシステム
- ◆ディーゼルエンジン,超小型モビリティ,
油圧駆動系などのモデルベースド制御 - ◆快適性や製造精度向上のための振動抑制制御
- ◆システム生物学や生命科学への応用
- ◆エネルギー管理システムへの応用

スワームロボット
| グループ名 | 名 前 | 職 位 | 連絡先 |
|---|---|---|---|
| 数理システム制御グループ | 東 俊一 | 教授 | shunichi.azuma@ |
| 浅井 徹 | 准教授 | asai@ | |
| 有泉 亮 | 助教 | ariizumi@ |
※メールを送信される場合は,東教授は@
脳の運動制御メカニズムに基づく知能システムの設計と制御
人間の巧みで多様な運動は、脳神経系の優れた制御メカニズムによって実現されている。このような脳の運動制御の仕組みや学習機能を解明するとともに、制御理論や最適化手法を用いて、インテリジェントな制御システムへの応用開発を目指す研究を行っている。
- ◆生体運動制御:身体運動の計測と解析,熟練運動の制御メカニズムなど
- ◆脳型情報処理:運動学習モデル,感覚運動統合システムなど
- ◆医療福祉技術:下肢麻痺者用歩行補助ロボット,リハビリテーション支援など
- ◆知能ロボット:高効率二足歩行,モデル予測制御,ヒューマノイド全身動作など
- ◆オペレーションズリサーチ:最適化,生産スケジューリング,動的計画法など


(左)装着型歩行補助ロボット
(右)ヒューマノイドの動作生成
| グループ名 | 名 前 | 職 位 | 連絡先 |
|---|---|---|---|
| 生体システム制御グループ | 田地 宏一 | 准教授 | taji@ |
※メールを送信される場合は@nuem.nagoya-u.ac.jpを後ろにつけて下さい。
先端システム科学によるモビリティシステムのモデル化・解析・制御
ハイブリッドシステム論や自律分散システム論等のシステム科学における最新の成果に基づいて、次世代モビリティのあるべき姿を探求する。特に人間との共生、複雑な環境への適応、という視点を意識し、理論構築と実装技術の両面において新たなブレークスルーを目指す。
- ◆数理モデルに基づく運転行動解析とその応用
- ◆運転行動支援のための制御理論・計測技術の構築
- ◆車輪型自律移動体の自己位置推定と行動計画
- ◆ヒューマノイドロボットの動作計画と制御
- ◆多脚歩行ロボットの分散制御と形式検証
- ◆大規模システムのための分散型確率的診断と最適化


(上)ドライビングシミュレータ
(下)多脚歩行ロボット
| グループ名 | 名 前 | 職 位 | 連絡先 |
|---|---|---|---|
| モビリティシステムグループ | 鈴木 達也 | 教授 | t_suzuki@ |
| 稲垣 伸吉 | 准教授 | inagaki@ | |
| 奥田 裕之 | 助教 | h_okuda@ |
※メールを送信される場合は@nuem.nagoya-u.ac.jpを後ろにつけて下さい。